|
ME 305 Website by Cole Sheedy
|


|
|
ME 305 Website by Cole Sheedy
|
|
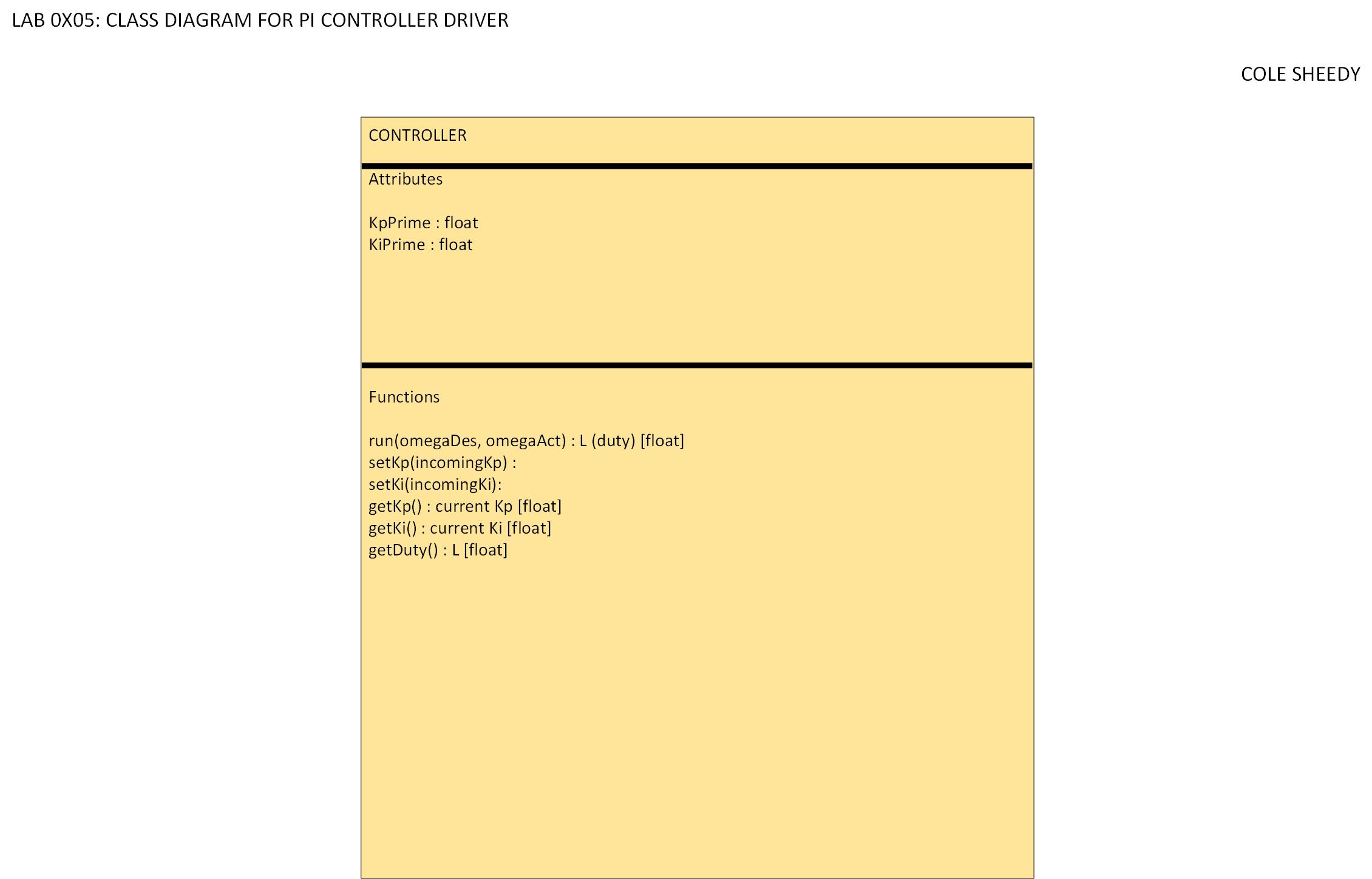
Implements a closed-loop PI-Controller. More...
Classes | |
| class | controllerDriverW4.controller |
| Implements desired functions of a pi-controller. More... | |
Implements a closed-loop PI-Controller.
This file contains the class used to initialize a pi-controller based on a Kp and Ki value, the functions to run the controller to a desired RPM and Degree position, ways to get the Kp and Ki value to print to the front end, and a way to set the Kp and Ki value from the front end.
Source code files and related ones:
mainW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/mainW4.py
userInterfaceFrontW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/userInterfaceFrontW4.py
UITaskW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/UITaskW4.py
controllerTaskW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/controllerTaskW4.py
shareW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/shareW4.py
controllerDriverW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/controllerDriverW4.py
encoderDriverW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/encoderDriverW4.py
motorDriverW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/motorDriverW4.py