|
ME 305 Website by Cole Sheedy
|


|
|
ME 305 Website by Cole Sheedy
|
|
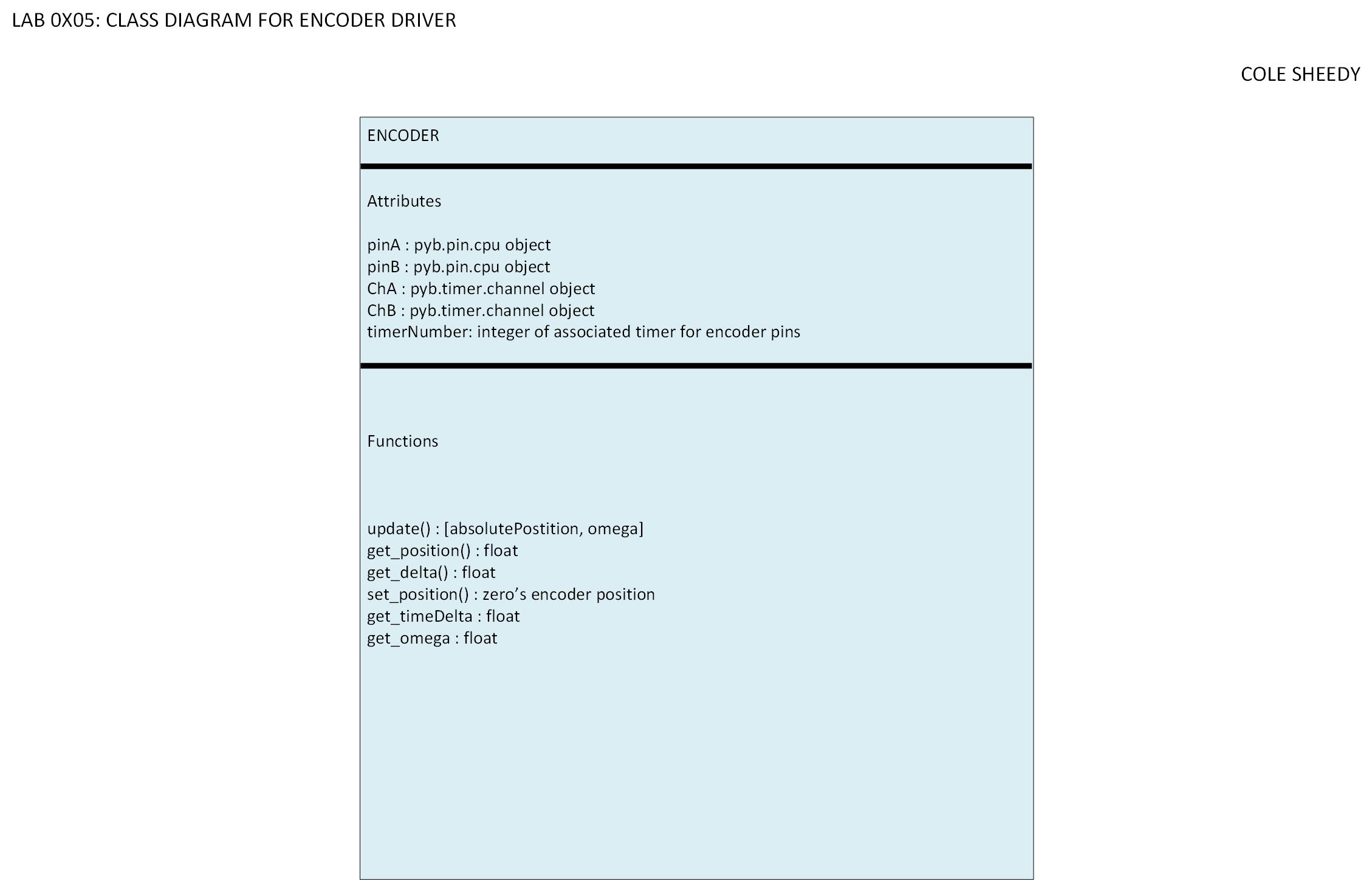
Reads Quadrature Encoders' A-B output to determine absolute positioning. More...
Classes | |
| class | encoderDriverW4.encoder |
| Used to effectively read encoders and relevent information. More... | |
Reads Quadrature Encoders' A-B output to determine absolute positioning.
This file contains the class used to initialize an encoder and other functions to read absolute positioning, delta values, and other significant values from quadrature encoders.
Source code files and related ones:
mainW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/mainW4.py
userInterfaceFrontW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/userInterfaceFrontW4.py
UITaskW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/UITaskW4.py
controllerTaskW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/controllerTaskW4.py
shareW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/shareW4.py
controllerDriverW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/controllerDriverW4.py
encoderDriverW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/encoderDriverW4.py
motorDriverW4.py https://bitbucket.org/ColeSheedy/me-305-work-repository/src/master/LabWork/Lab5.3/motorDriverW4.py